





自动化热缩管工艺(二)
概念系统设计
从概念上讲,该团队决定设计和制造一个装有两个加热枪的加热室,其尺寸允许由热缩管包裹的直径高达3英寸的线束受控通过,并连接到电机驱动的线性运动系统,该系统可容纳1至15英尺不等的线束长度。对腔室的线速度和内部温度进行监测和控制,以使线束和卡套管在适当的温度下暴露预定的时间,从而产生所需的卡套管收缩。
首先开发了图1所示的小规模原型,以评估图2所示的带有短线束段的腔室设计。该原型由线性定位系统上的仪器加热室组成,并配有两个对称定位的加热枪。腔室设计允许热空气通过通道从热风枪引导到线束上。这些空气通道径向分布以提供均匀的加热,并且还沿移动方向倾斜以预热线束的未示出的部分。
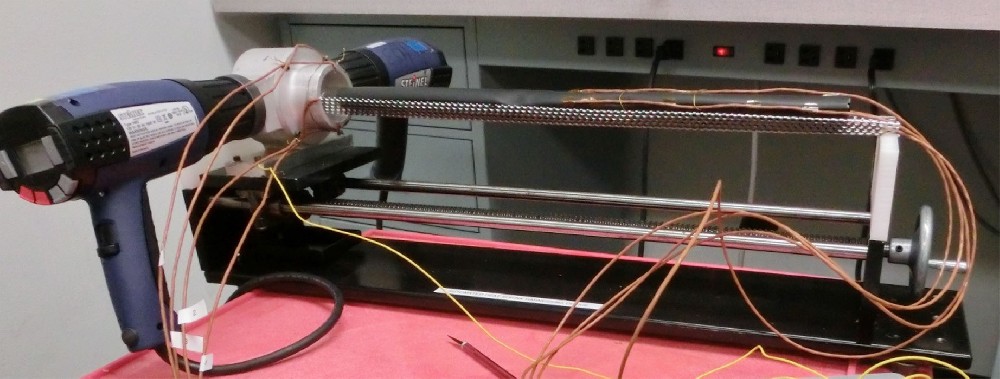
图1热缩管机原型
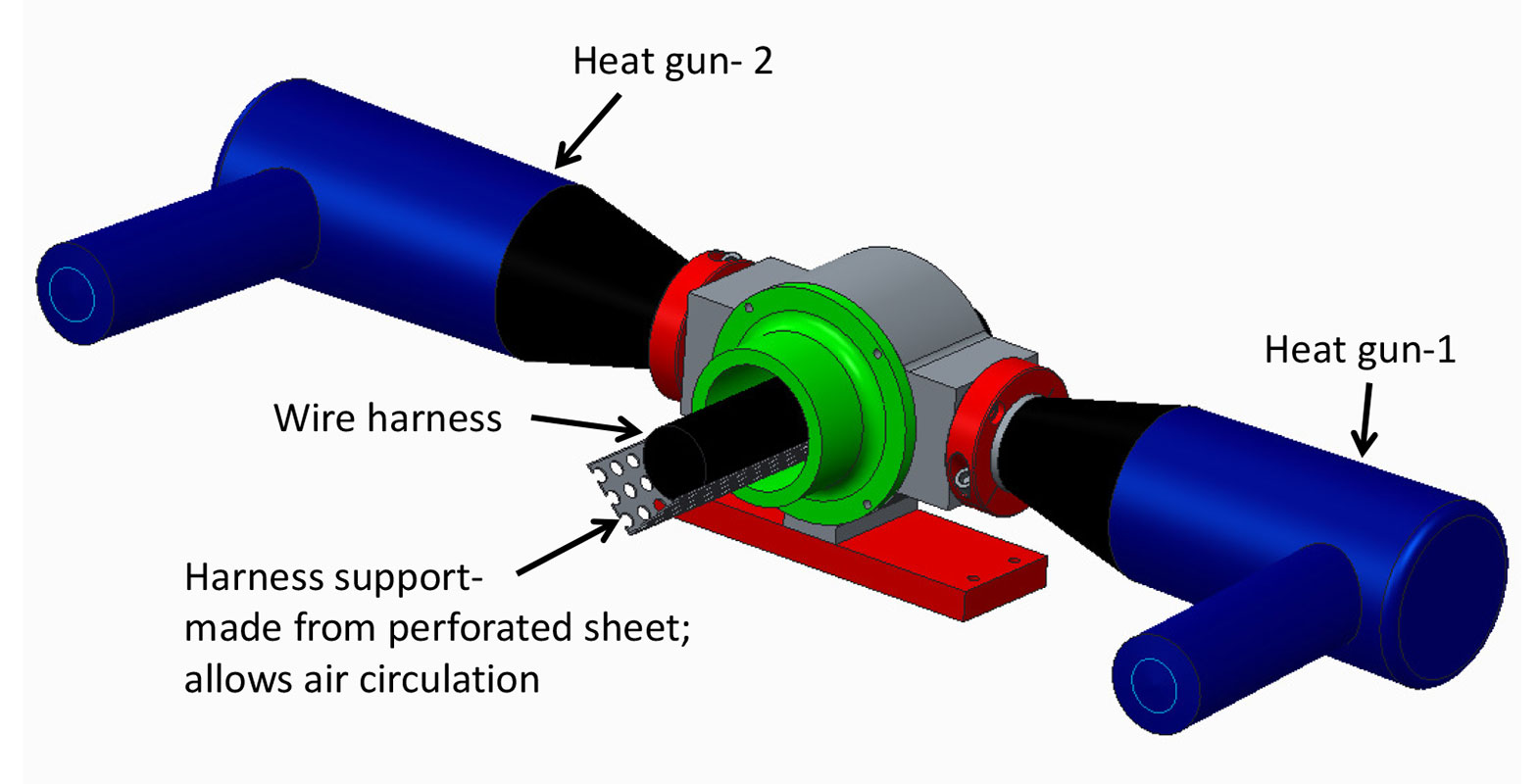
图2 加热室原型设计
线性定位系统被设计成当达到推荐的收缩温度水平(175-200℃)时沿着线束移动加热室。由于环境条件和热风枪操作中的潜在变化,在管段上进行了一系列实验,并提供了与腔室出口处的热空气温度/流速和适当收缩过程的腔室线速度相关的数据。选择了与加热室内的空气温度和所需速度值(Td,d)相关的查找表方法。当温度在其期望的设定点附近波动时,速度设定点被相应地调整以进行补偿。从技术上讲,这是一个开环解决方案;然而,闭环策略需要监测实际的管道收缩情况——也许使用图像处理系统,这将被证明是不必要的复杂和成本效益。
另一个必要条件是控制器单元,用于管理致动器位置和速度以满足预期的热暴露性能;如今,在嵌入式控制器设备的帮助下构建控制单元是常见的。为了开发这样的控制单元,除了选择和配置适当的硬件外,还应该在软件环境中开发和实现控制算法。然后将软件部署到硬件平台中。根据受控过程、工厂环境特征和控制原理,不同的平台可以用于不同的应用。为此应用选择了可编程逻辑控制器(PLC)(与ASIC、FPGA、DSP等其他类型的嵌入式控制器相比)。这种选择的主要原因是热缩管机将在恶劣的工业环境中工作,在这种情况下,PLC是最佳选择。另一个原因是,由于PLC是一个集成控制系统,它将提供与传感器和致动器层接口所需的隔离、信号调节和电流/电压放大。最终,PLC将通过预定义的标准协议与HMI面板和个人计算机等其他设备轻松通信。
系统建模与控制结构
建模方法分为两大类:数据驱动模型和分析模型。数据驱动建模使用系统识别等技术,而分析建模创建了一个框图模型,用于实现控制系统动力学的微分/代数方程。一种类型的分析建模是物理建模,其中通过连接块来创建模型,这些块表示实际工厂所包含的物理元素。这个项目受益于这种建模。换言之,热缩管机器或设备被分解为其物理构建块,并且每个块将被单独建模。接下来,所有建模的构建块连接在一起,以对整个系统进行建模。
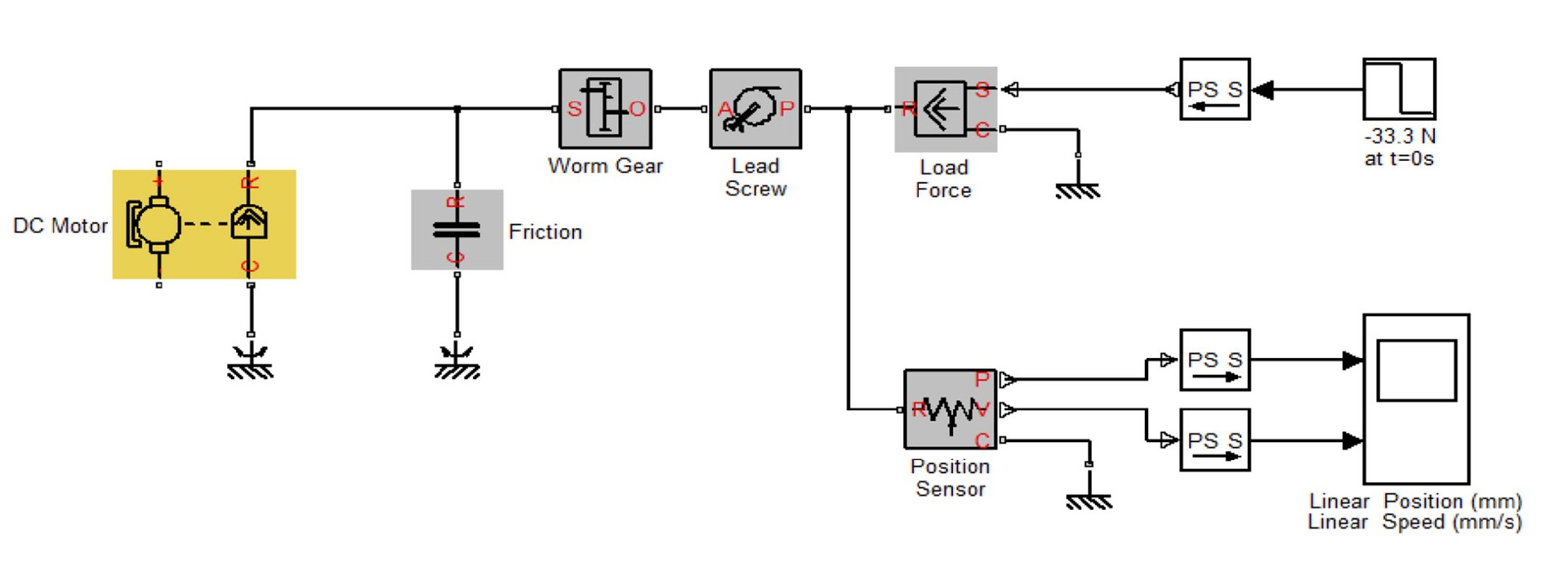
图3 线性定位系统MATLAB/Simulink模型
选择了Mathworks的MATLAB/Simulink作为仿真环境。它是一个多领域的软件包,使该软件成为开发控制系统和测试系统级性能的完美选择。MATLAB/Simulink中的Simscape库提供了来自机械、电气、热学和其他物理领域的构建块,使其能够在不直接处理数学方程的情况下对完整的物理系统进行建模。设计者需要为每个构建块设置一些属性。Simscape模型自动生成表示系统行为的微分方程。这些方程与系统模型的其余部分集成,并直接求解。Simscape元素通过物理建模的连接连接在一起,这就是为什么每个参数和变量都有自己的物理单位,所有单位转换都会自动处理。
原型机中的加热室是通过转动带有连接手柄的螺杆手动驱动的,从而产生线性运动(图1)。在全尺寸系统中,将采用伺服电机自动驱动加热室。由此产生的系统模型如图3所示,其中直流电机块表示所选电机的等效电路,并包括电机的电气和机械特性。直流电机旁边的摩擦块显示了相互物理接触的旋转部件之间的旋转摩擦。摩擦值是作为相对速度的函数来计算的。蜗轮和导螺杆块代表了将旋转运动转换为线性位移所需的机构。负载力块模型是基于输入信号进行控制的理想力源。“理想”一词意味着它足够强大,无论源终端的速度如何,都能保持恒定的力。燃烧室(包括夹具、外壳和底座)和两个加热枪的总负载重量为7.49磅(3.4公斤),将为我们提供33.32 N的模拟负载力。最终,位置传感器块模拟平移运动传感器,其输出为线性速度和位置。
自动热缩管机将在与除操作员以外的任何其他制造设施交互的情况下工作。按照顺序,操作员启动机器,将线束放入其中,并监督其操作模式。操作模式可以通过由诸如按钮、传感器和内部信号之类的设备触发的事件信号来改变,这些设备在控制逻辑中定义并依赖于内部变量。这种控制方案是用离散事件系统(DES)建模的。DES是一个具有离散状态空间和事件驱动动力学的系统,即状态只能随着时间的推移而异步发生的瞬时事件而改变[5]。在这种情况下,传统上使用状态图来描述这类系统,尽管也有其他方法,如Petri网模型。MATLAB/Simulink具有在状态图中开发和模拟控制器的能力。图4说明了出于监督控制目的的相应想法。
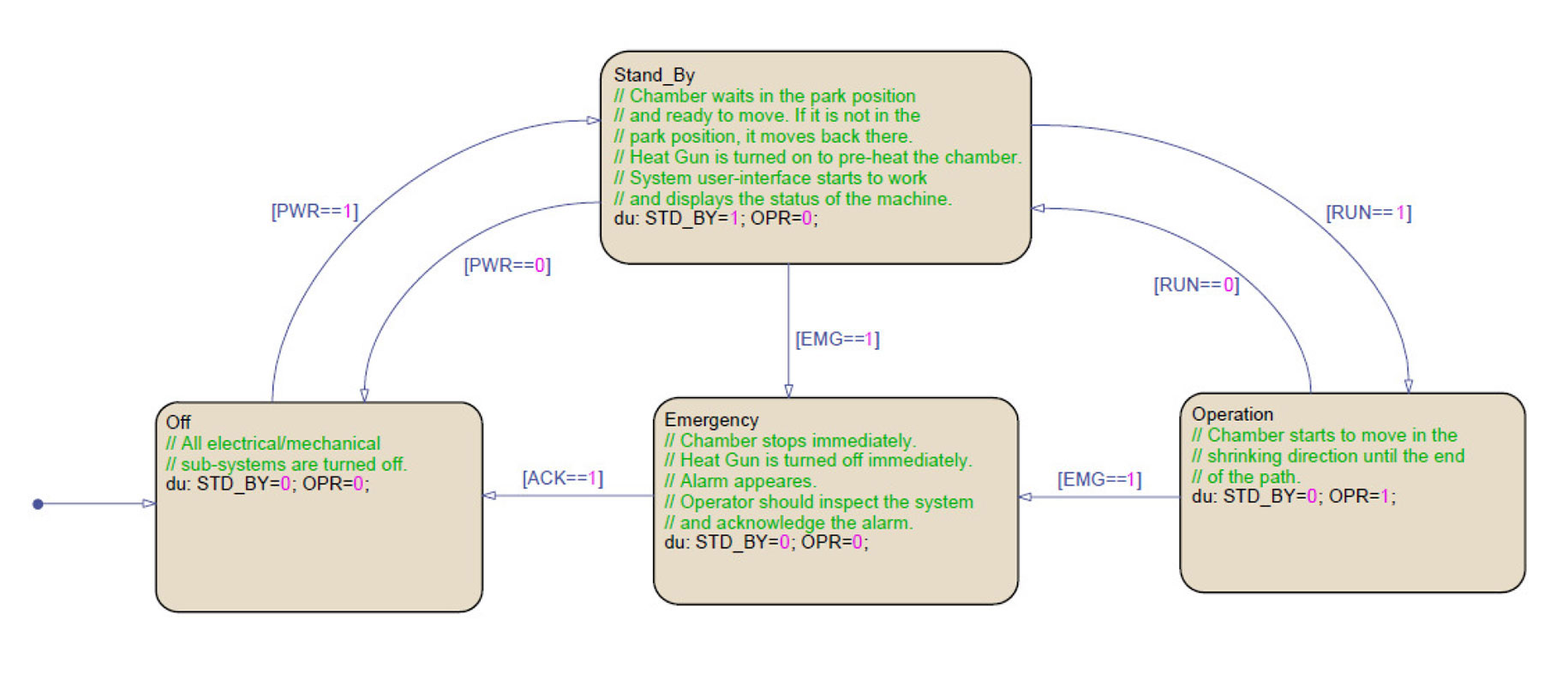
图4 用于管理操作模式的状态图
在所有现有的单输入/单输出控制器中,最常见的是误差驱动的比例、积分、微分或PID控制。许多复杂的控制系统可以使用控制器单元,其主要控制构建块是PID控制模块。在典型的PID控制器中,由于可能的噪声放大,导数(D)项比使用比例(P)或积分(I)控制更需要注意。在许多应用中,I项或更一般地说,PI项在使系统能够跟踪恒定设定点或等效地迫使误差信号为零方面表现令人满意。尽管设计更复杂,但在本项目中,我们将利用级联PI结构的优势,该结构由控制主要物理参数(此处为电机角速度)的外环控制器(主控制器)和读取外环控制器输出作为设定点的内环控制器(从控制器)组成,通常控制变化更快的参数(此处是电机电流)。结果表明,级联型PI控制器的工作频率增加,整个系统的时间常数减小。
PI控制器参数KP和KI被调整以形成闭环系统特性,包括响应速度、稳定时间和超调,以确保稳定性和可接受的稳态误差。调整PI控制器的最常见方法是基于试验和误差,例如使用MATLAB的SISO工具。还有分析方法,如根轨迹,以及其他频域技术和实用方法,如齐格勒-尼科尔斯。这些方法都提供了一阶近似,结果通常需要设计者进一步手动调整[7]。在当前项目中,PID控制器构建块中的调谐器实用程序用于设计控制器参数。当不应用外循环时,必须首先对内循环进行调谐。然后,当外循环被调谐时,内循环被设置为跟踪模式。图5显示了在MATLAB/Simulink中设计的控制器的原理框图。
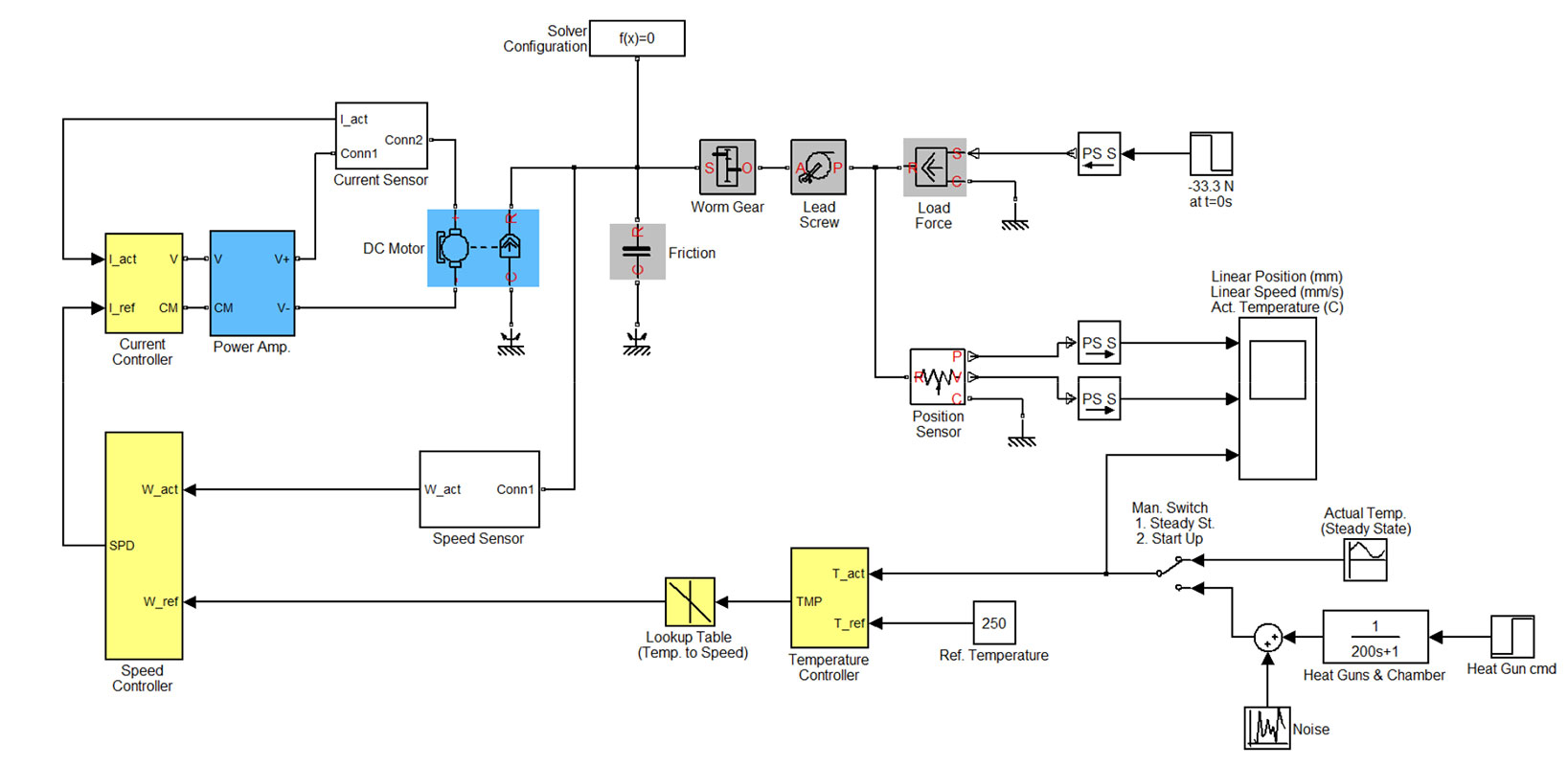
图5 系统模型以及设计的控制器框图
本文由东莞云林原创,欢迎关注,带你一起长知识!

 业务QQ
业务QQ 